This work formed my part PhD dissertation. The aim of which was to develop an autonomous system to control the feedback sensation and perception of surface texture using vibrational feedback for prosthetics.
The work was divided into two main questions:
1) Can dissispation of vibration trends be used to identify specific tactile perception? 2) By manipulating these trends can we auto-adapt the stimulus to the user’s specific perceptua needs?
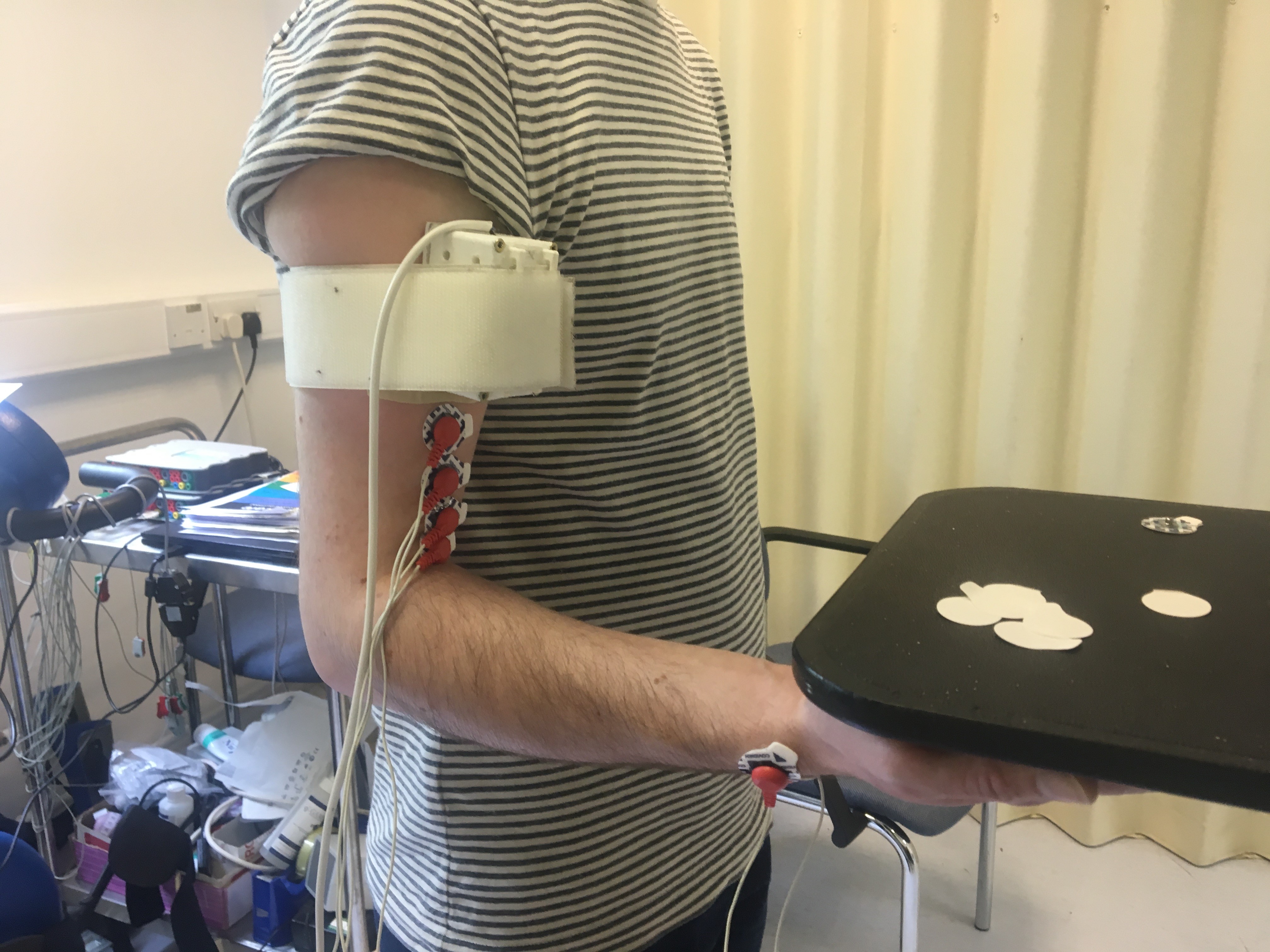
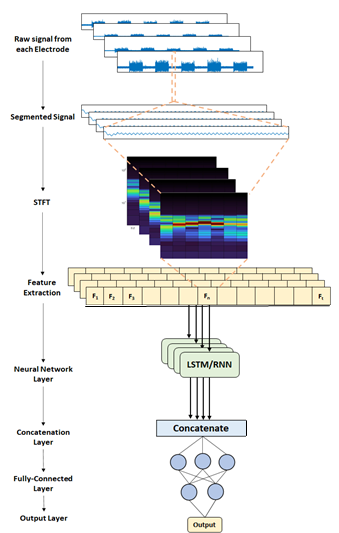
The first question was answered by developing a novel method to measure vibrations via electromyography signals (EMG) and using machine learning classifiers (LSTM’s and CNN’s) to categorise them to specific participants and perceptions. The second was established by creating a feedback loop using deep reinforcement learning to adjust the vibration parameters of the motors in real-time to specific dissipation trend. This work was interesting and novel. The application of reinforcemenet learning has not been used in this way in the field prior to this and the work showed some indication of the method being a viable way to maintain perception over time.
Prior to the PhD I had no experience with machine learning. It was an interesting journey and more work will be conducted in the future to develop the reinforcement learning algorithm into a tactile sleeve for users. Unfortunately, partway through the PhD the pandemic hit and I was not allowed in my lab space for 8 months (I was based in the royal national orthopedic hospital at the time) which significantly reduced the amount of practical work I could do. Nevertheless it was a fun and interesting experience.
My work was published in several IEEE conferences as full papers and abstracts:
International Conference for Biomedical Robotics and Biomechatronics (BioRob 2020) International Conference on Rehabilitation Robotics (ICORR 2022) International Conference for Biomedical Robotics and Biomechatronics (BioRob 2022)