After my masters and during my PhD I helped develop the hardware, software and maths coursework for the Robotic Control Theory and Systems module offered by UCL Masters in Robotics and Computation programme.
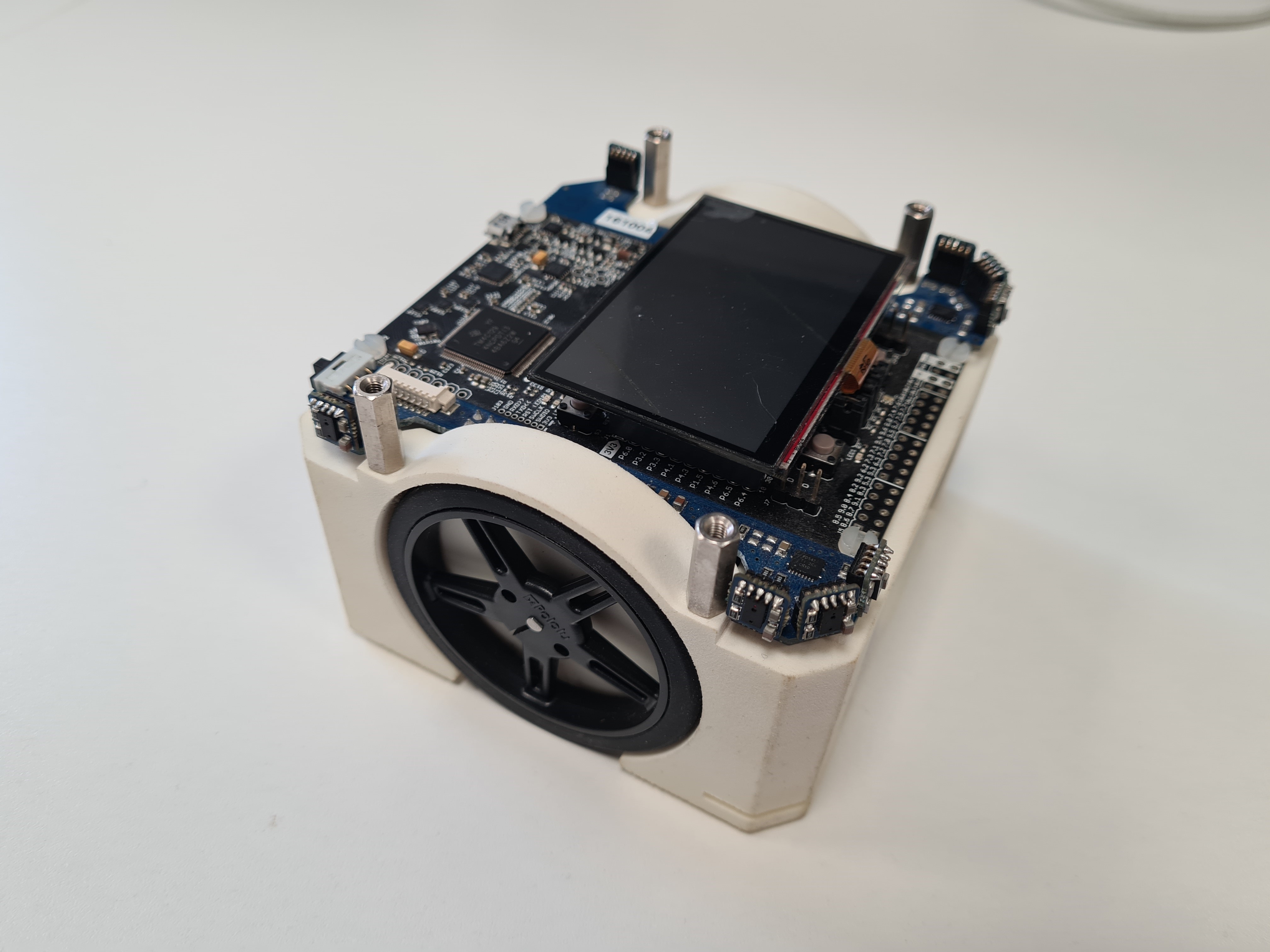
The aim of the course was to teach students sensor integration and basic control theory implementation such as PID control and MPC. To achieve that, UCL developed small differential drive robots with ToF sensors and wheel encoders controlled via a MSP-EXP432 board. We taught students communication protocols such as I2C and Spi to allow them to communicate with the sensors effectively. Courseworks centered around applying various controllers to achieve preset tasks.
Over the years we focused less on the maths coursework and more on the hardware and software implementation. As the course grew and after covid, we utilised a simulation of the robot in MATLAB to teach the necessary controllers.